


電動汽車動力電池需要高功率密度、高能量密度、壽命長、環保等要求,而鋰電池具有上述優點,因此在電動汽車中得到廣泛應用,今天就來說說這鋰電池和管理他們的系統。
常用電池類型及其應用要求
車用鋰電池主要有以下類型(一部分)。

電池放電溫度在-20~55℃。充電溫度在0~45℃。如果以
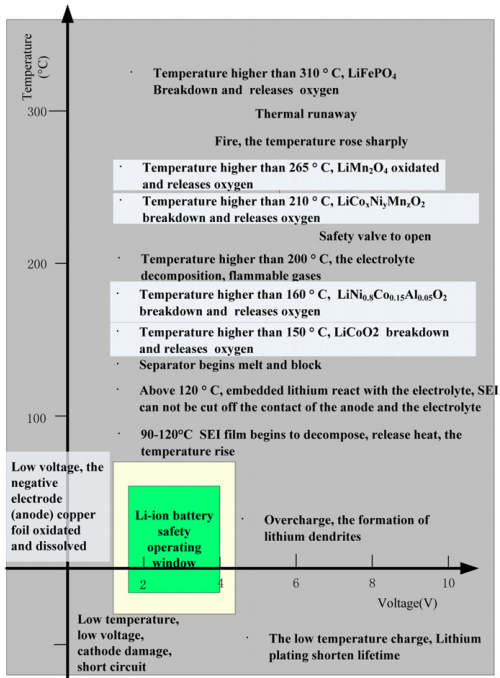
圖1 電池安全工作區域
通常溫度為90~120℃,SEI膜開始進入放熱分解(圖1)。有些電解質甚至會在更低的溫度下進行分解;當溫度超過120℃,SEI膜無法保護碳負極與有機電解質副反應產生氣體;當溫度超過130℃,隔膜開始融化并切斷電池反應。當溫度溫度更高,正極材料開始分解。當溫度超過200℃,電解質開始分解產生可燃氣體。分解的可燃氣與氧氣會發生劇烈的化學反應并導致熱失控。充電溫度小于0℃會導致金屬鋰在碳負極表面沉積,因此降低電池的循環壽命。在低溫極端情況下,會導致電池負極刺穿從而引起短路情況的發生。如果電壓過低或者電池過放,相變導致電池晶格崩潰從而影響電池的性能。甚至會引起負極集流片溶解在電解質中。極端的過放同樣會導致電解質的減少并產生易燃氣體并因此造成潛在的安全風險。高電壓和過充會破壞正極構成并導致大量的熱產生。同樣會導致金屬鋰沉積在負極表面并加速容量衰減和導致電池內部短路并引發安全問題,電池電壓在4.5V左右電解質開始分解。
鋰電池在電動汽車上的應用情況
目前有多種類型的動力電池用在電動汽車上,廣泛應用的動力電池一般以LMO、LFP、NCM、NCA為正極材料,同時采用碳負極材料,同時LTO也被開發用于提高電池的續航里程和快充能力。
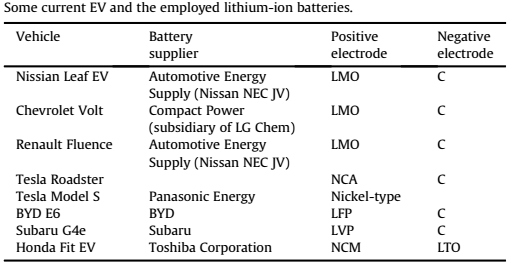
表1 電動汽車的鋰電池應用情況
BMS功能及其關鍵技術
目前商用電池必須要有BMS。通過BMS能夠控制和管理電池更加有效率,每一個電池工作在可運行的區間范圍內,避免電池的過充過放和熱失控問題發生。單個電芯的容量比較低,需要很多個電芯集成成模組、一個電池系統包含多個模組。通常一個電池系統中包含上百個,甚至上千個電芯。如何保持電芯工作在合適的區間內,BMS發揮著重要的作用。
BMS功能為監視電池狀態,建立電池狀態、保護電池、上報數據、均衡等。BMS在整車中主要任務有:
1、保護電芯和電池包不受到損害;
2、使電池工作在合適的電壓和溫度范圍內;
3、在保持電池在合適的條件運行后,滿足整車的需求。
當然BMS同時需滿足相關標準法規要求。BMS基本的硬件架構如圖2。
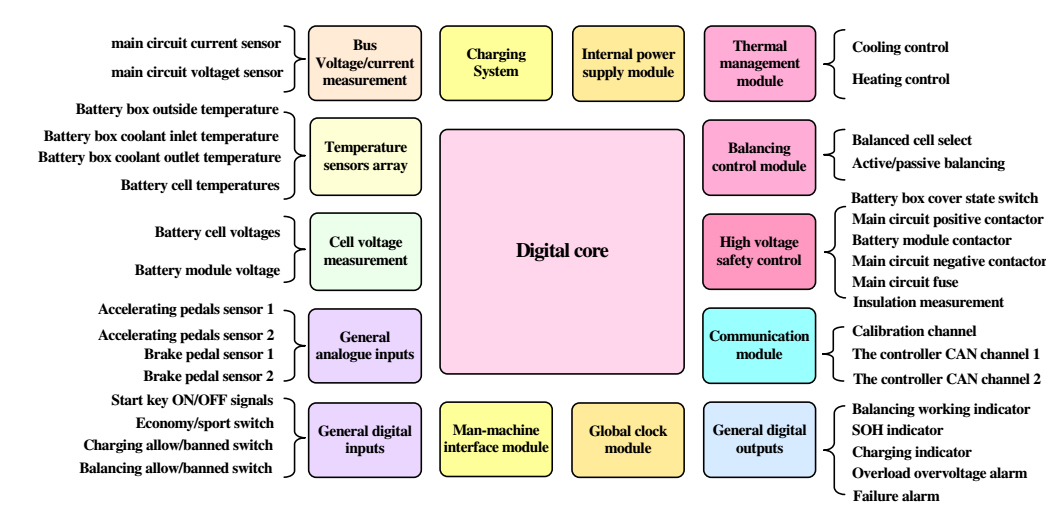
圖2 BMS基本硬件架構
4、電池參數檢測:包括總壓、總電流、單體電壓檢測、溫度檢測、絕緣檢測、碰撞檢測、阻抗檢測、煙霧檢測等等。
5、電池狀態建立:包括SOC、SOH、SOF。
6、在線診斷:故障包括傳感器故障、網絡故障、電池故障、電池過充、過放。過流,絕緣故障等等。
7、電池安全保護和告警:包括溫控系統控制和高壓控制,當診斷出故障、BMS上報故障給整車控制器和充電機,同時切斷高壓來保護電池不受到損害、包括漏電保護等。
8、充電控制:BMS慢充和快充控制。
9、電池一致性控制:BMS采集單體電壓信息、采用均衡方式使電池達到一致性、電池的均衡方式有耗散式和非耗散式。
10、熱管理功能:電池包各點的采集溫度,在充電和放電過中,BMS決定是否開啟加熱和冷卻。
11、網絡功能:包括在線標定和健康,在線程序下載。通常采用CAN網絡。
12、信息存儲:BMS需要存儲關鍵數據如SOC、SOH、充放電安時數、故障碼等。
BMS關鍵技術
BMS的關鍵技術有電池單體電壓的精確測量、電池狀態的建立、電池的一致性均衡、電池的故障診斷技術等。
1、單體電壓測量:
單體電壓測量的難點:
a、電池系統中有很多電池串聯在一起,需要多通道對電池電壓進行采集。每個電池的電壓可能不同,這給硬件電路設計帶來困難。
b、電芯電壓的測量需要有很高的采集精度(如![]() ),特別是建立電池的SOC狀態時。
),特別是建立電池的SOC狀態時。
下面以C/LPF和C/NCM為例:圖3反應了不同的開路電壓與SOC的對應關系,從圖中可以看出C/NCM的OCV取消斜率比較抖,最大每mv電壓對應的soc變化率為0.4%(除了60~70%),如果電池的測量精度在10mv,那么SOC根據OCV的對應關系建立的狀態誤差不會超過4%。對于C/NCM電池,電芯的測量精度在10mv以內,但是對于C/LFP的OCV曲線比較平坦,電壓對應的soc變化率為都超過了4%,所以需要單體電壓的采集精度要很高,然而大多數采集芯片的精度只能達到5%左右。目前單體電壓采集主要采用集成芯片的方式進行采集,在表2中列出了一些集成芯片。
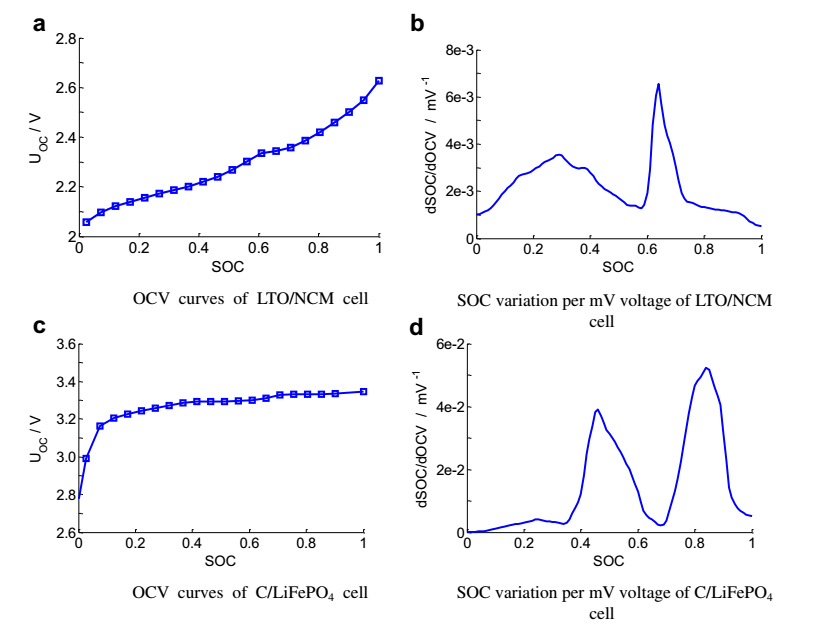
圖3 不同開路電壓與SOC關系以及每mv電壓對SOC的影響(實驗溫度在25℃,靜置3h)
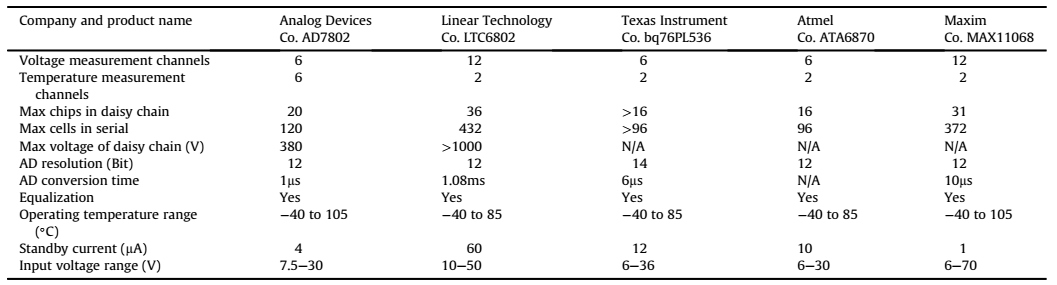
表2 不同單體電壓采集芯片及其采集精度
2、電池狀態建立
電池狀態包括SOC、SOF、SOH。它們之間的關系如圖4,
3、Soc算法有:
1) 放電測試法;
2) 累積安時法;
3) 開路電壓法,根據OCV與SOC一一對應的關系,精度比較高,但是需要有電池較長時間的靜置(同時需考慮電壓遲滯現象,如圖5);
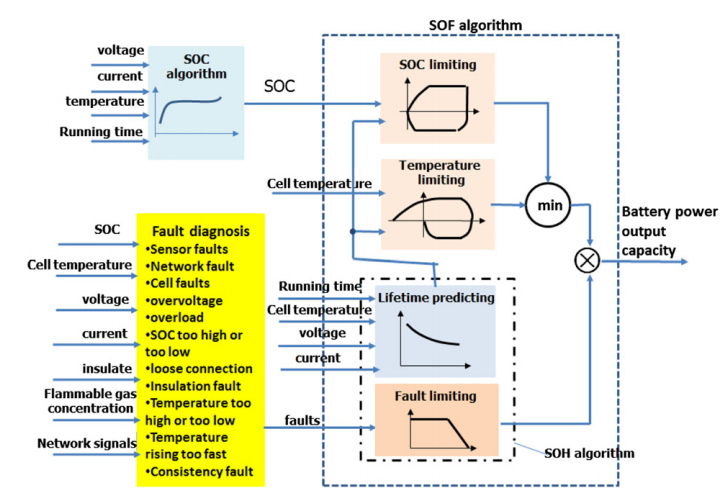
圖4 BMS狀態建立算法框架
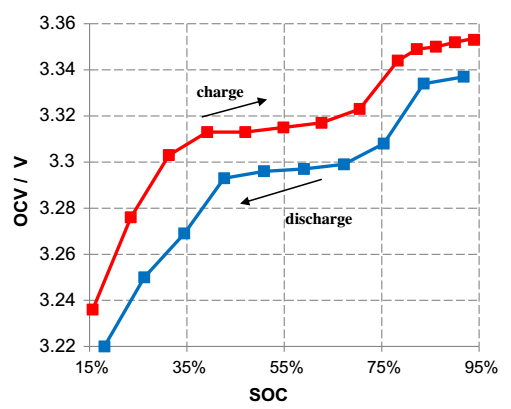
圖5 磷酸鐵鋰充放電OCV曲線(測量溫度為25℃,靜置3h)
4、電池模型建模:開路電壓法需要有很長的時間進行靜置,在線等到電池的開路電壓需要采用電池模型。通常采用的電池模型有等效電路模型、電化學模型,其中等效電路模型可以用下面進行表示:
如果電池模型參數是已知,很容易得到電池的開路電壓,根據OCV-SOC曲線表,查詢得到電池的SOC狀態。通常電池模型采用Rint模型,一階RC模型、二階模型,其中二階模型SOC最大誤差為4.3%,最小誤差為1.4%采用電池模型方法,精度和模型復雜度是需要考慮的重點,目前等效電路模型有12種,電池模型可以用于動態進行建立SOC,SOC的精度取決與模型的精度和信號采集的精度。根據相關文獻對12種等效電路模型進行參數識別、模型的精度和復雜程度比較發現一階模型加入遲滯比較適合磷酸鐵鋰電池,模型簡單同時精度比較高。
電化學模型建立在物質傳遞的基礎上,涉及化學熱力學理論和電化學理論。跟電池內部很多材料的參數息息相關很難進行精確的表達,通常用于電池性能分析以及電池設計中。
5、神經網絡模型:通過神經網絡模型的非線性映射特性、不考慮電池的詳細信息,并且具有普遍適用性,適合建立不同電池的SOC狀態。然而需要大量的訓練樣本數據以及訓練數據和訓練方法大大影響電池SOC的精度。神經網絡模型需要進行大量的數據計算,需要有高性能的CPU芯片。
6、模糊算法:需要對電池有足夠的認知和理解,同時計算量比較大。
7、根據電池的其它特性進行SOC估計:比較交流內阻和直流內阻(如圖6)。
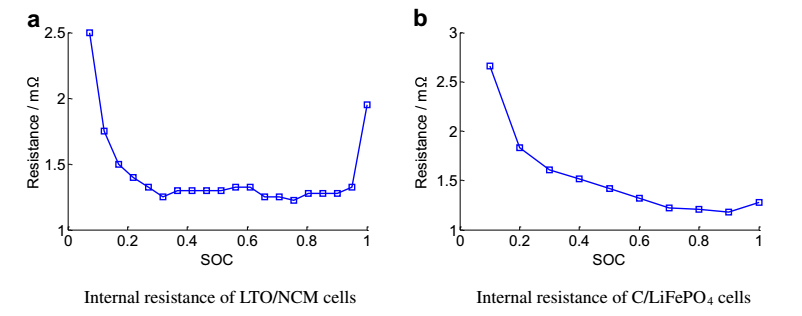
圖6 電池直流內阻與SOC關系(測量溫度為25℃,HPPC測試方法)
8、基于以上2種或多種的集成算法。
目前集成算法包括簡單的校正,加權融合算法,卡爾曼濾波(或者擴展卡爾曼濾波,EKF),滑模觀測器等。
簡單的校正集成算法主要包括:
1.) 安時積分算法和開路電壓校正:安時積分算法充滿后對SOC進行標定等。
對于純電動汽車:a. 工作條件簡單,在車輛行駛過程中,除了再生制動,主要處于放電狀態,當車輛在充電過程中,電池處于充電狀態,開路電壓的遲滯很容易進行建立。b. 電池包的容量比較大,安時積分相對與電池包容量來說還是比較小。c. 滿充的概率比較大,通過開路電壓對初始SOC的標定,能夠滿足純電動車SOC的精度要求。
2.) 加權融合算法:
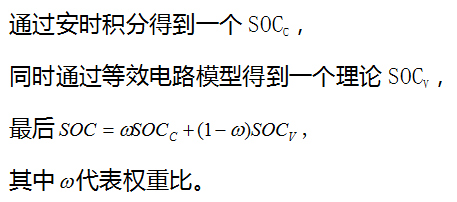
目前加權融合算法已經運用在通用公司混動汽車上。
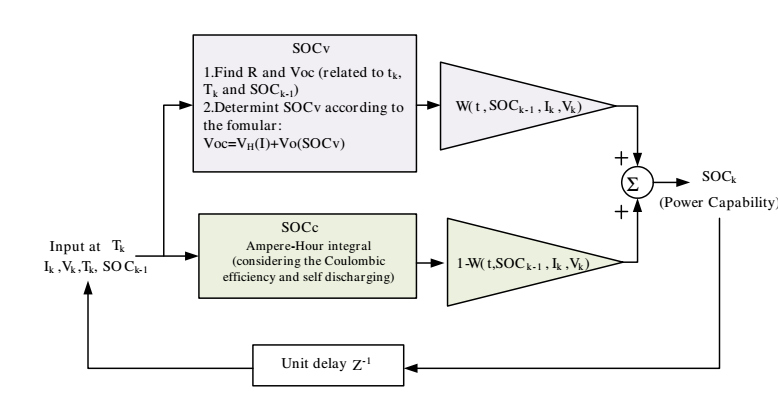
圖7 加權算法
不同的SOC算法的比較如下表3、表4:
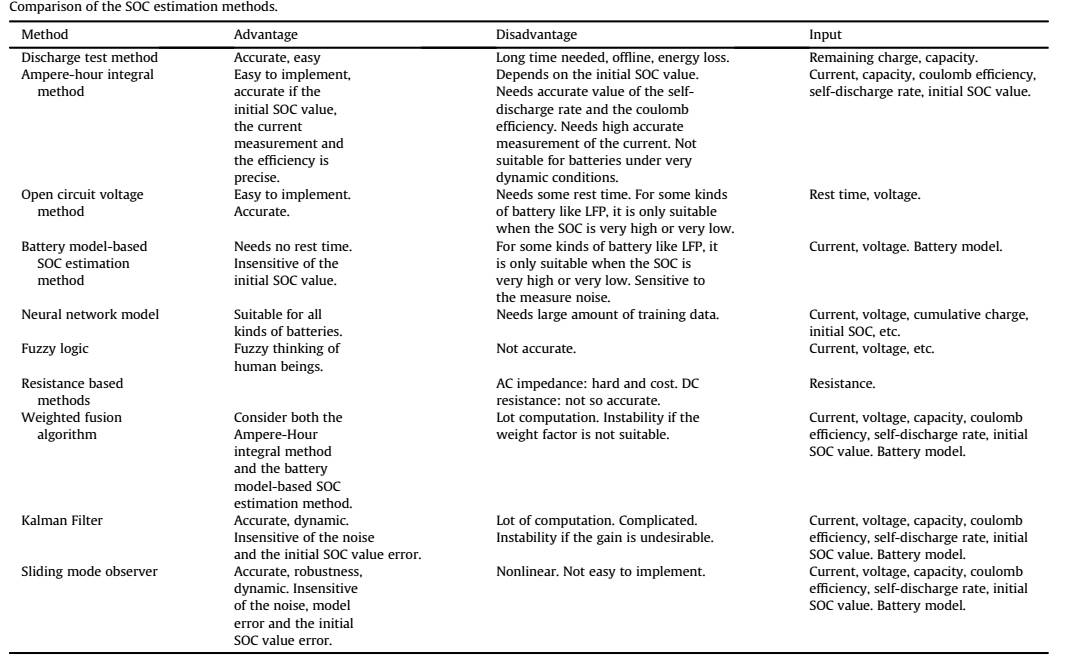
表3 SOC算法特點比較
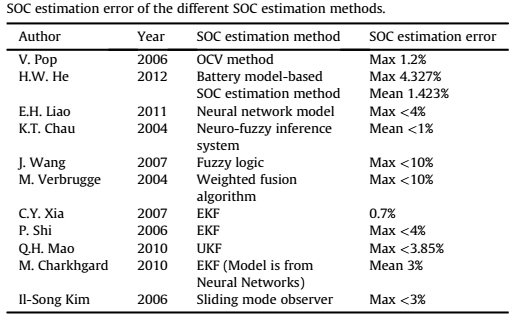
表4 SOC算法精度比較
BMS是管理和控制動力電池工作在合適的溫度和電壓范圍內在,可以看出BMS對于電動車輛續航里程、電池壽命、電池安全性的重要性。


